EASYNEW電動缸在六自由度平臺上的應用
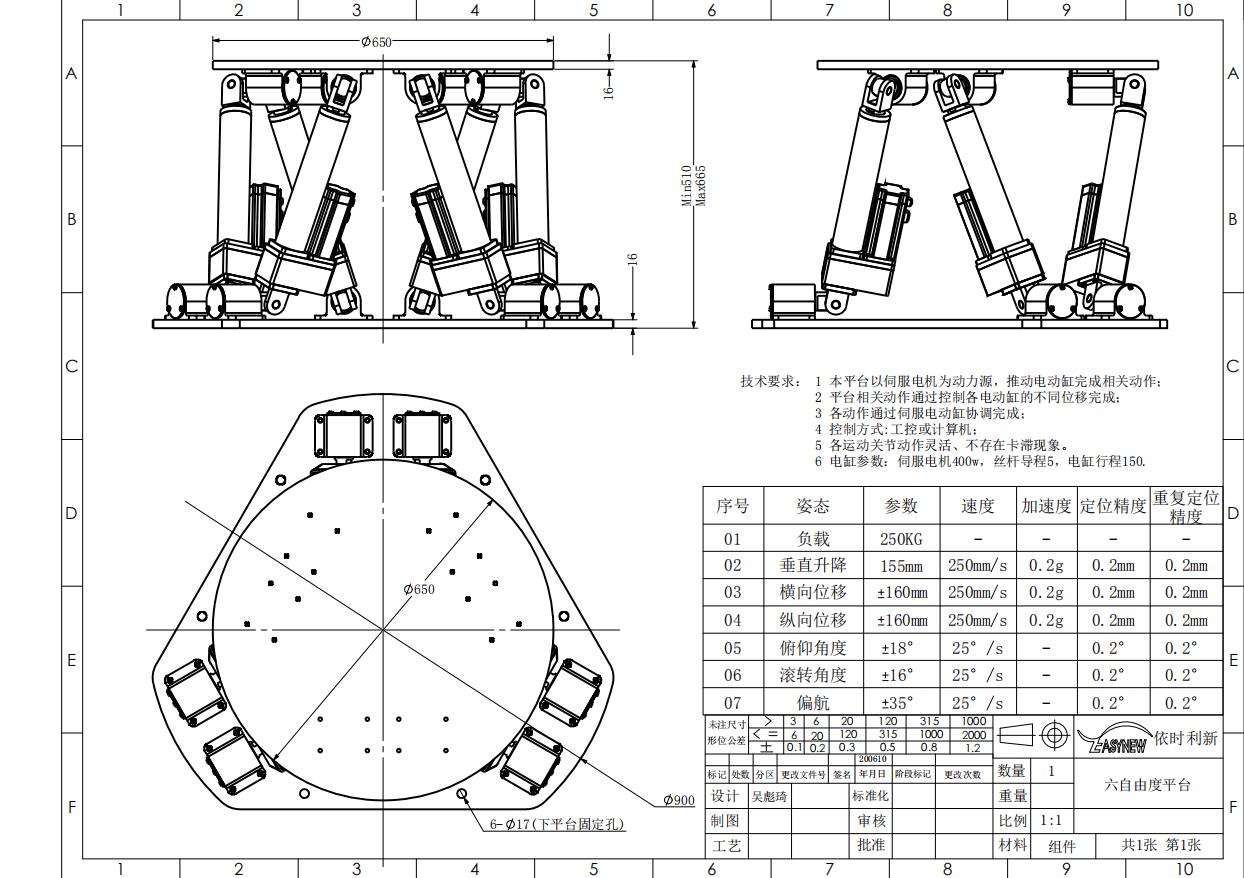
六自由度運動平臺是用于飛行器、運動器(如飛機、車輛)模擬訓練的動感模擬裝置,是一種并聯運動機構,它通過改變6個可以伸縮的電動缸來實現平臺的空間六自由度運動(垂直向、橫向、縱向、俯仰、滾轉、搖擺),即X、Y、Z方向的平移和繞X、Y、Z軸的旋轉運動,以及這些自由度的復合運動。

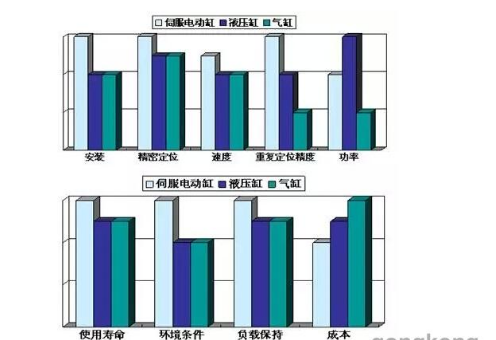
EASYNEW電動缸六自由度運動平臺是新技術的應用,平臺具有清潔、整潔等優點,特別是運動精度方面,更是液壓運動平臺無法比擬的,故該平臺廣泛應用于武器研發、數控機床、醫療手術、航天對接等領域。
六自由度平臺具有以下特點:
(1) 六自由度平臺由6個缸同時支撐,與串聯機構的懸臂梁相比,剛度大,結構穩定,在相同的自重或體積下有比串聯機構高的承載能力;
(2) 串聯機構末端件上的誤差是各個關節誤差的積累和放大,因而其精度低,誤差大,而采用并聯機構的六自由度平臺沒有誤差積累和放大,因此誤差小、精度高;
(3) 六自由度平臺采用對稱式結構,各向同性好;
(4) 在位置求解方面,串聯機構求正解容易,但求反解十分困難,而采用并聯機構的六自由度平臺求正解困難,求反解卻非常容易。在線實時計算時是要求反解,相比之下,并聯機構容易實現。
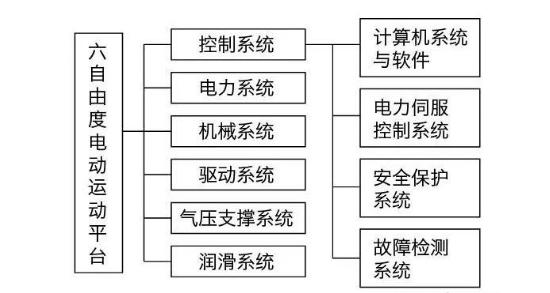
軟件部分主要包括用戶界面程序、伺服算法程序、PID參數設置程序等。
電控部分的作用是接收控制系統輸出的指令數據,并將其傳輸給伺服驅動器,驅動器將信號放大后控制電機運動,進而帶動電動缸運動,并最終使臺體實現各種姿態。包括工控機、運動控制卡、伺服驅動器、伺服電機、電阻尺及相關電器元件等。
機械部分用于支撐負載,包括上平臺、上連接鉸、下連接鉸、電動缸、支撐架、底座等。平臺由電動缸驅動,進行橫滾、偏航、俯仰三個姿態和X、Y、Z平移共6個自由度的運動。
電動缸具有傳動效率高、應用范圍廣、定位精度高、靜音運行、結構簡單、維護方便、可靠性和安全性高、運行平穩、使用壽命長等優點。
附:六自由度平臺的發展
1965年,英國工程師Stewar提出六軸并聯式空間機構;
70年代初,美國出現六自由度并聯機構運動平臺的飛行模擬器并制定系統標準。自此,六自由度運動平臺趨向標準化、系列化生產階段;
1978年,澳大利亞機構學專家Hunt.KH提出平臺機構用作并聯機器人的主要機構;
Mac.Callion 和Pham在1979年首次利用六自由度平臺機構設計出裝配機器人,拉開了并聯機器人研究的序幕;
進入80年代以后,六自由度運動平臺越來越廣泛的應用于機器人、并聯機床、空間對接技術、航空航海設備、搖擺模擬以及娛樂設施上。