
【供應(yīng)】6軸運(yùn)動(dòng)控制器,多軸運(yùn)動(dòng)控制器
多軸運(yùn)動(dòng)控制器
1、運(yùn)動(dòng)控制器概述
隨著現(xiàn)代控制技術(shù)的提高,運(yùn)動(dòng)控制器的出現(xiàn)在某種意義上滿足了新型數(shù)控系統(tǒng)的標(biāo)準(zhǔn)化、開放性的要求,為各種工業(yè)設(shè)備、國防設(shè)備以及智能醫(yī)療裝置的自動(dòng)化控制系統(tǒng)的研制和改造提供一個(gè)統(tǒng)一的硬件平臺(tái)。整體而言,運(yùn)動(dòng)控制器是一種控制裝置,其核心為中央邏輯控制單元,敏感元件一般為傳感器,控制對(duì)象為電機(jī)或動(dòng)力裝置和執(zhí)行單元。目前,大多數(shù)的運(yùn)動(dòng)控制器是一種基于PC機(jī)或工業(yè)PC機(jī)的上位控制單元,多用于控制步進(jìn)電機(jī)或伺服電機(jī),在控制過程中,控制器可以完成運(yùn)動(dòng)控制的所有細(xì)節(jié)(包括脈沖和方向信號(hào)的輸出、自動(dòng)升降速的處理、原點(diǎn)和限位等信號(hào)的檢測(cè)等)。一般地,控制器都配有開放的函數(shù)庫供用戶在DOS或Windows系統(tǒng)平臺(tái)下自行開發(fā),從而構(gòu)造所需的控制系統(tǒng)。
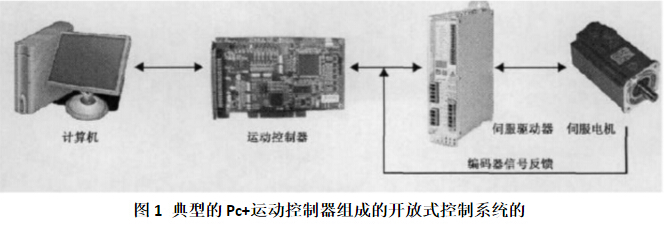
圖1給出典型的PC+運(yùn)動(dòng)控制器組成的開放式控制系統(tǒng)的簡(jiǎn)圖:一般地,運(yùn)動(dòng)控制器發(fā)送運(yùn)動(dòng)控制指令到伺服驅(qū)動(dòng)器,由伺服驅(qū)動(dòng)器驅(qū)動(dòng)伺服電機(jī)運(yùn)行,再通過伺服電機(jī)上的編碼器反饋信號(hào)返回至運(yùn)動(dòng)控制器,至此,整個(gè)運(yùn)動(dòng)控制系統(tǒng)實(shí)現(xiàn)運(yùn)動(dòng)控制器的閉環(huán)控制。
圖1 典型的Pc+運(yùn)動(dòng)控制器組成的開放式控制系統(tǒng)的
2、運(yùn)動(dòng)控制器國內(nèi)外研究現(xiàn)狀
在20世紀(jì)90年代,國際發(fā)達(dá)國家就已經(jīng)相繼推出運(yùn)動(dòng)控制器產(chǎn)品,包括美國Deltatau公司的PMAC多軸運(yùn)動(dòng)控制器,英國TRIO公司的PCI208多軸運(yùn)動(dòng)控制器以及德國MOVTEC公司開發(fā)的DEC4T運(yùn)動(dòng)控制器等。近年來,運(yùn)動(dòng)控制器作為一個(gè)獨(dú)立的工業(yè)自動(dòng)化控制類產(chǎn)品,已經(jīng)被越來越多的工業(yè)領(lǐng)域所接受。目前,由這些發(fā)達(dá)國家研制的運(yùn)動(dòng)控制器已開始在機(jī)器人控制、半導(dǎo)體加工、飛行模擬器等新興行業(yè)得到了很大的應(yīng)用,其在傳統(tǒng)的機(jī)床控制領(lǐng)域所占的市場(chǎng)份額也在不斷的擴(kuò)大。
我國在運(yùn)動(dòng)控制器產(chǎn)品開發(fā)方面相對(duì)滯后,1999年固高科技有限公司開始開發(fā)、生產(chǎn)開放式運(yùn)動(dòng)控制器,隨后,國內(nèi)又有其它幾家公司進(jìn)入該領(lǐng)域,但實(shí)際上,其大多是在國內(nèi)推廣國外生產(chǎn)的運(yùn)動(dòng)控制器產(chǎn)品,真正進(jìn)行自主開發(fā)的公司較少。深圳固高、深圳摩信是國內(nèi)較早(20世紀(jì)90年代晚期)從事獨(dú)立開放式運(yùn)動(dòng)控制器的廠家,推出了一些通用的運(yùn)動(dòng)控制器。如固高的GT系列運(yùn)動(dòng)控制器、摩信的MCT8000系列運(yùn)動(dòng)控制器;長沙力鼎科技有限公司的MC系列3軸模擬電壓控制/編碼器反饋型運(yùn)動(dòng)控制器,4軸有/無反饋脈沖輸出型運(yùn)動(dòng)控制器;南京順康數(shù)碼科技有限公司的MC6014A使用了帶插補(bǔ)功能、可以控制4個(gè)電機(jī)的DSP運(yùn)動(dòng)控制芯片,適用于PC機(jī)ISA總線的線路板;成都步進(jìn)機(jī)電有限公司的MPC01和MPC02系列3軸步進(jìn)或數(shù)字式伺服控制運(yùn)動(dòng)控制器。
目前,我國作為世界上經(jīng)濟(jì)發(fā)展最快的國家之一,市場(chǎng)上新設(shè)備
的控制需求、傳統(tǒng)設(shè)備技術(shù)升級(jí)和換代對(duì)運(yùn)動(dòng)控制器的市場(chǎng)需求越來越大,在這樣的形勢(shì)下,研制出具有自主知識(shí)產(chǎn)權(quán)的高水平、高可靠性的開放式運(yùn)動(dòng)控制器,突破發(fā)達(dá)國家對(duì)我國的技術(shù)壁壘,實(shí)現(xiàn)運(yùn)動(dòng)控制器的國產(chǎn)化顯得尤為重要。
3、運(yùn)動(dòng)控制器分類
目前市場(chǎng)上可以看到的運(yùn)動(dòng)控制器依據(jù)不同的原則有不同的分類。按照運(yùn)動(dòng)控制器的核心技術(shù)方案,主要有基于模擬電路型、基于微控制單元型、基于可編程邏輯型、基于數(shù)字信號(hào)處理(DSP)型等;按照運(yùn)動(dòng)控制器的系統(tǒng)結(jié)構(gòu),可分為基于總線的運(yùn)動(dòng)控制器和獨(dú)立應(yīng)用的運(yùn)動(dòng)控制器以及混合型的運(yùn)動(dòng)控制器;按照位置控制原理,可以分為開環(huán)、半閉環(huán)和閉環(huán)三種基本的控制方案;按照被控量的性質(zhì)和運(yùn)動(dòng)控制方式,可以分為位置控制、速度和加速度控制、同步控制、力和力矩控制。
而國內(nèi)的運(yùn)動(dòng)控制器生產(chǎn)廠商提供的產(chǎn)品大致可以分為三類:
(1)以單片機(jī)或微處理器作為核心的運(yùn)動(dòng)控制器,這類運(yùn)動(dòng)控制器速度較慢,精度不高,成本相對(duì)較低。在一些只需要低速點(diǎn)位運(yùn)動(dòng)控制和對(duì)軌跡要求不高的輪廓運(yùn)動(dòng)控制場(chǎng)合應(yīng)用。
(2)以專用芯片(ASIC)作為核心處理器的運(yùn)動(dòng)控制器,這類運(yùn)動(dòng)控制器結(jié)構(gòu)比較簡(jiǎn)單,大多數(shù)工作于開環(huán)控制方式,基本滿足于對(duì)單軸的點(diǎn)位控制。但對(duì)于要求多軸協(xié)調(diào)運(yùn)動(dòng)和高速軌跡插補(bǔ)控制的設(shè)備,這類運(yùn)動(dòng)控制器不能夠提供連續(xù)插補(bǔ)功能,很難滿足要求。
(3)基于PC總線的以DSP和FPGA為核心處理器的開放式運(yùn)動(dòng)
控制器。近年來,DSP以其功能強(qiáng)、速度快、編程和開發(fā)方便等優(yōu)點(diǎn),在多軸運(yùn)動(dòng)控制技術(shù)領(lǐng)域得到了很大的發(fā)展。此類控制器即以DSP作為核心處理器,以PC機(jī)作為信息處理平臺(tái),以插卡形式嵌入PC機(jī),形成“PC+運(yùn)動(dòng)控制器”的模式。功能上,通常都能提供板上的多軸協(xié)調(diào)運(yùn)動(dòng)控制與復(fù)雜的運(yùn)動(dòng)軌跡規(guī)劃、實(shí)時(shí)的插補(bǔ)運(yùn)算、誤差補(bǔ)償、伺服濾波算法,能夠?qū)崿F(xiàn)閉環(huán)控制。
第一類運(yùn)動(dòng)控制器由于其性能的限制,主要應(yīng)用于一些單軸簡(jiǎn)單運(yùn)動(dòng)的場(chǎng)合。第二類運(yùn)動(dòng)控制器因其結(jié)構(gòu)簡(jiǎn)單、成本較低,占有一定的市場(chǎng)份額,但由于其專用芯片(ASIC)僅能提供運(yùn)動(dòng)控制的基本功能,限制了這種運(yùn)動(dòng)控制器在復(fù)雜條件的使用。第三類運(yùn)動(dòng)控制器是目前國內(nèi)運(yùn)動(dòng)控制器產(chǎn)品的主流,應(yīng)用也從傳統(tǒng)的機(jī)床數(shù)控?cái)U(kuò)展到了如機(jī)器人控制、激光加工、紡織、電子加工等多個(gè)領(lǐng)域。本課題的研究?jī)?nèi)容即為設(shè)計(jì)出一款適應(yīng)于工業(yè)焊接機(jī)械人的第三類運(yùn)動(dòng)控制器。
4、運(yùn)動(dòng)控制器發(fā)展趨勢(shì)
隨著控制技術(shù)的快速發(fā)展,傳統(tǒng)的運(yùn)動(dòng)控制技術(shù)由于其封閉式結(jié)構(gòu)!控制軟件兼容性差等原因,已經(jīng)不能滿足現(xiàn)代工業(yè)的發(fā)展要求。 目前而言,新型的運(yùn)動(dòng)控制器有以下幾個(gè)主要的發(fā)展趨勢(shì): 現(xiàn)階段,新型數(shù)控系統(tǒng)標(biāo)準(zhǔn)化、柔性化的要求促使了現(xiàn)代控制系統(tǒng)中開放性體系概念的提出。所謂開放性體系即系統(tǒng)應(yīng)具備使不同應(yīng)用程序能很好地運(yùn)行于不同供應(yīng)商提供的不同平臺(tái)之上的能力,不同應(yīng)用程序之間能夠相互操作的能力和一致的用戶交互風(fēng)格。新型運(yùn)動(dòng)控制器應(yīng)該以開放化為目標(biāo),能夠方便地與機(jī)床、機(jī)器人等被控設(shè)備
聯(lián)接,硬件上能夠?qū)崿F(xiàn)一到多個(gè)坐標(biāo)軸位置、速度和軌跡伺服控制,軟件上具有完善的軌跡插補(bǔ)、運(yùn)動(dòng)規(guī)劃和伺服控制。
其次,新型運(yùn)動(dòng)控制器應(yīng)該在結(jié)構(gòu)上應(yīng)形成模塊化,易于實(shí)現(xiàn)數(shù)控系統(tǒng)的集成化和標(biāo)準(zhǔn)化,可以通過積木方式進(jìn)行方便的相互組合,以建立適用于不同場(chǎng)合、不同功能需求控制系統(tǒng),為各種工業(yè)設(shè)備、國防設(shè)備以及智能醫(yī)療裝置的自動(dòng)化控制系統(tǒng)的研制和改造提供一個(gè)統(tǒng)一的硬件平臺(tái)。
最后,新型的運(yùn)動(dòng)控制器應(yīng)該緊跟計(jì)算機(jī)技術(shù)的快速發(fā)展。隨著現(xiàn)代計(jì)算機(jī)功能的強(qiáng)大,利用運(yùn)動(dòng)控制卡和PC機(jī)相結(jié)合,或者將PC系統(tǒng)直接嵌入運(yùn)動(dòng)控制卡中已經(jīng)成為一個(gè)重要的發(fā)展趨勢(shì)。